
IEEE Boston Section
Microwave Theory and Technology Society
Refreshments (pizza and beverages) with socialization will start at 5:30 PM.
The technical talk will be from 6:00 – 7:00 PM.
Anthony Grbic of University of Michigan

The research area of metamaterials has captured the imagination of scientists and engineers over the past two decades by allowing unprecedented control of electromagnetic fields. The extreme manipulation of fields has been made possible by the fine spatial control and wide range of material properties that can be attained through subwavelength structuring. Research in this area has resulted in devices which overcome the diffraction limit, render objects invisible, and even break time reversal symmetry. It has also led to flattened and conformal optical systems and ultra-thin antennas. This seminar will identify recent advances in the growing area of metamaterials, with a focus on metasurfaces: two dimensional metamaterials. The talk will explain what they are, the promise they hold, and how these field-transforming surfaces are forcing the rethinking of electromagnetic/optical design.
Electromagnetic metasurfaces are finely patterned surfaces whose intricate patterns/textures dictate their electromagnetic properties. Conventional field-shaping devices, such as lenses in prescription eye glasses or a magnifying glass, require thickness (propagation length) to manipulate electromagnetic waves through interference. In contrast, metasurfaces manipulate electromagnetic waves across negligible thicknesses through surface interactions, by impressing abrupt phase and amplitude discontinuities onto a wavefront. The role of the visible (propagating) and invisible (evanescent) spectrum in establishing these discontinuities will be explained. In addition, it will be shown how metasurfaces allow the complete transformation of fields across a boundary, and how this unique property is driving a new generation of ultra-compact electromagnetic and optical devices with unparalleled field control. Metasurfaces will be described that exhibit various field tailoring capabilities including multiwavelength and multifunctional performances and extreme field shaping. In addition, metasurfaces with multi-input to multi-output capabilities will be presented that open new opportunities in adaptive and trainable designs.
Biography: Anthony Grbic received the B.A.Sc., M.A.Sc., and Ph.D. degrees in electrical engineering from the University of Toronto, Canada, in 1998, 2000, and 2005, respectively. In 2006, he joined the Department of Electrical Engineering and Computer Science, University of Michigan, Ann Arbor, MI, USA, where he is currently a Professor. His research interests include engineered electromagnetic structures (metamaterials, metasurfaces, electromagnetic band-gap materials, frequency-selective surfaces), microwave circuits, antennas, plasmonics, wireless power transmission, and analytical electromagnetics/optics.
Anthony Grbic has made pioneering contributions to the theory and development of electromagnetic metamaterials and metasurfaces: finely textured, engineered electromagnetic structures/surfaces that offer unprecedented wavefront control. Dr. Grbic is a Fellow of the IEEE. He is currently an IEEE Microwave Theory and Techniques Society Distinguished Microwave Lecturer (2022-2025). He is also serving on the IEEE Antennas and Propagation Society (AP-S) Field Awards Committee and IEEE Fellow Selection Committee. From 2018 to 2021, he has served as a member of the Scientific Advisory Board, International Congress on Artificial Materials for Novel Wave Phenomena – Metamaterials. In addition, he has been Vice Chair of Technical Activities for the IEEE Antennas and Propagation Society, Chapter IV (Trident), IEEE Southeastern Michigan Section, from Sept. 2007 – 2021. From July 2010 to July 2015, he was Associate Editor for the rapid publication journal IEEE Antennas and Wireless Propagation Letters. Prof Grbic was Technical Program Co-Chair in 2012 and Topic Co-Chair in 2016 and 2017 for the IEEE International Symposium on Antennas and Propagation and USNC-URSI National Radio Science Meeting. Dr. Grbic was the recipient of AFOSR Young Investigator Award as well as NSF Faculty Early Career Development Award in 2008, the Presidential Early Career Award for Scientists and Engineers in January 2010. He also received an Outstanding Young Engineer Award from the IEEE Microwave Theory and Techniques Society, a Henry Russel Award from the University of Michigan, and a Booker Fellowship from the United States National Committee of the International Union of Radio Science in 2011. He was the inaugural recipient of the Ernest and Bettine Kuh Distinguished Faculty Scholar Award in the Department of Electrical and Computer Science, University of Michigan in 2012. In 2018, Prof. Anthony Grbic received a 2018 University of Michigan Faculty Recognition Award for outstanding achievement in scholarly research, excellence as a teacher, advisor and mentor, and distinguished service to the institution and profession. In 2021, he was selected as 1 of 5 finalists worldwide for the A.F. Harvey Engineering Research Prize, for his pioneering contributions to field of electromagnetic metamaterials. The A.F. Harvey Prize is the Institution of Engineering and Technology’s (IET’s) most valuable prize fund.
COURSE DESCRIPTION
Course Kick-off / Orientation Thursday, April 18, 6:00PM – 6:30PM.
Live Workshops: 6:00PM – 7:30PM, Thursdays, April 25, May 2, 9, 16, 23
Registration is open through the last live workshop date. Live workshops are recorded for later use.
Attendees will have access to the recorded session and exercises for two months (until July 23, 2024) after the live session ends!
Speaker: Dan Boschen

IEEE Member Fee (by April 11th): $190.00
IEEE Member Fee (after April 11th): $285.00
IEEE Non-Member Fee (by April 11th): $210.00
IEEE Non-Member Fee (after April 11th) $315.00
Decision to run/cancel course: Friday, April 12, 2024
COURSE DESCRIPTION
New Format Combining Live Workshops with Pre-recorded Video
This is a hands-on course providing pre-recorded lectures that students can watch on their own schedule and an unlimited number of times prior to live Q&A/Workshop sessions with the instructor. Ten 1.5 hour videos released 2 per week while the course is in session will be available for up to two months after the conclusion of the course.
Course Summary
This course is a fresh view of the fundamental and practical concepts of digital signal processing applicable to the design of mixed signal design with A/D conversion, digital filters, operations with the FFT, and multi-rate signal processing. This course will build an intuitive understanding of the underlying mathematics through the use of graphics, visual demonstrations, and applications in GPS and mixed signal (analog/digital) modern transceivers. This course is applicable to DSP algorithm development with a focus on meeting practical hardware development challenges in both the analog and digital domains, and not a tutorial on working with specific DSP processor hardware.
Now with Jupyter Notebooks!
This long-running IEEE Course has been updated to include Jupyter Notebooks which incorporates graphics together with Python simulation code to provide a “take-it-with-you” interactive user experience. No knowledge of Python is required but the notebooks will provide a basic framework for proceeding with further signal processing development using that tools for those that have interest in doing so.
This course will not be teaching Python, but using it for demonstration. A more detailed course on Python itself is covered in a separate IEEE Course “Python Applications for Digital Design and Signal Processing”.
Students will be encouraged but not required to load all the Python tools needed, and all set-up information for installation will be provided prior to the start of class.
Target Audience:
All engineers involved in or interested in signal processing applications. Engineers with significant experience with DSP will also appreciate this opportunity for an in-depth review of the fundamental DSP concepts from a different perspective than that given in a traditional introductory DSP course.
Benefits of Attending/ Goals of Course:
Attendees will build a stronger intuitive understanding of the fundamental signal processing concepts involved with digital filtering and mixed signal analog and digital design. With this, attendees will be able to implement more creative and efficient signal processing architectures in both the analog and digital domains. The knowledge gained from this course will have immediate practical value for any work in the signal processing field.
Topics / Schedule:
Pre-recorded lectures: (3 hours each) will be distributed Friday prior to each week’s workshop dates. Workshop/Q&A Sessions are 6 – 7:30PM on the dates listed below.
Kick-off / Orientation: Thursday, April 18, 2024
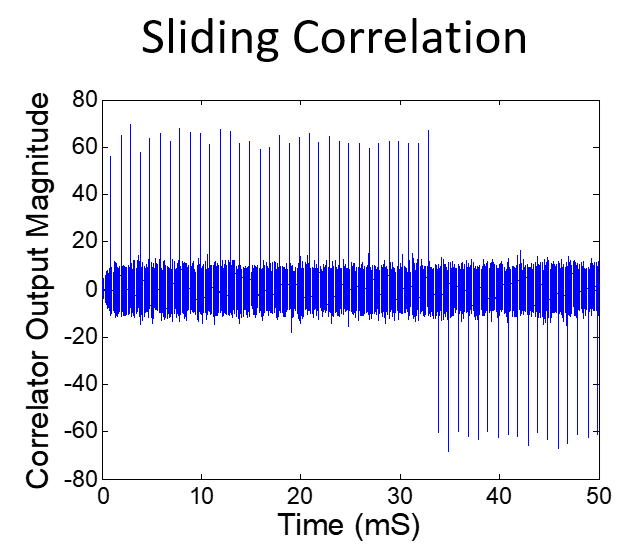
Class 1: April 25, 2024: Correlation, Fourier Transform, Laplace Transform
Class 2: May 2, 2024: Sampling and A/D Conversion, Z –transform, D/A Conversion
Class 3: May 9, 2024: IIR and FIR Digital filters, Direct Fourier Transform
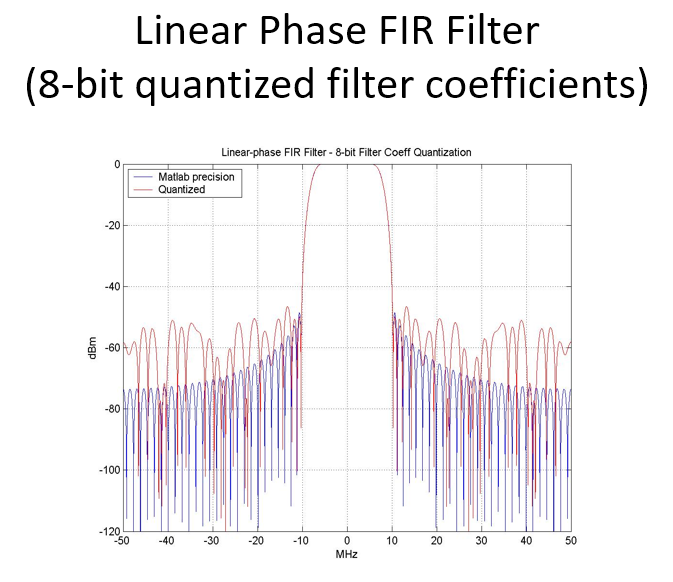
Class 4: May 16, 2024: May Windowing, Digital Filter Design, Fixed Point vs Floating Point
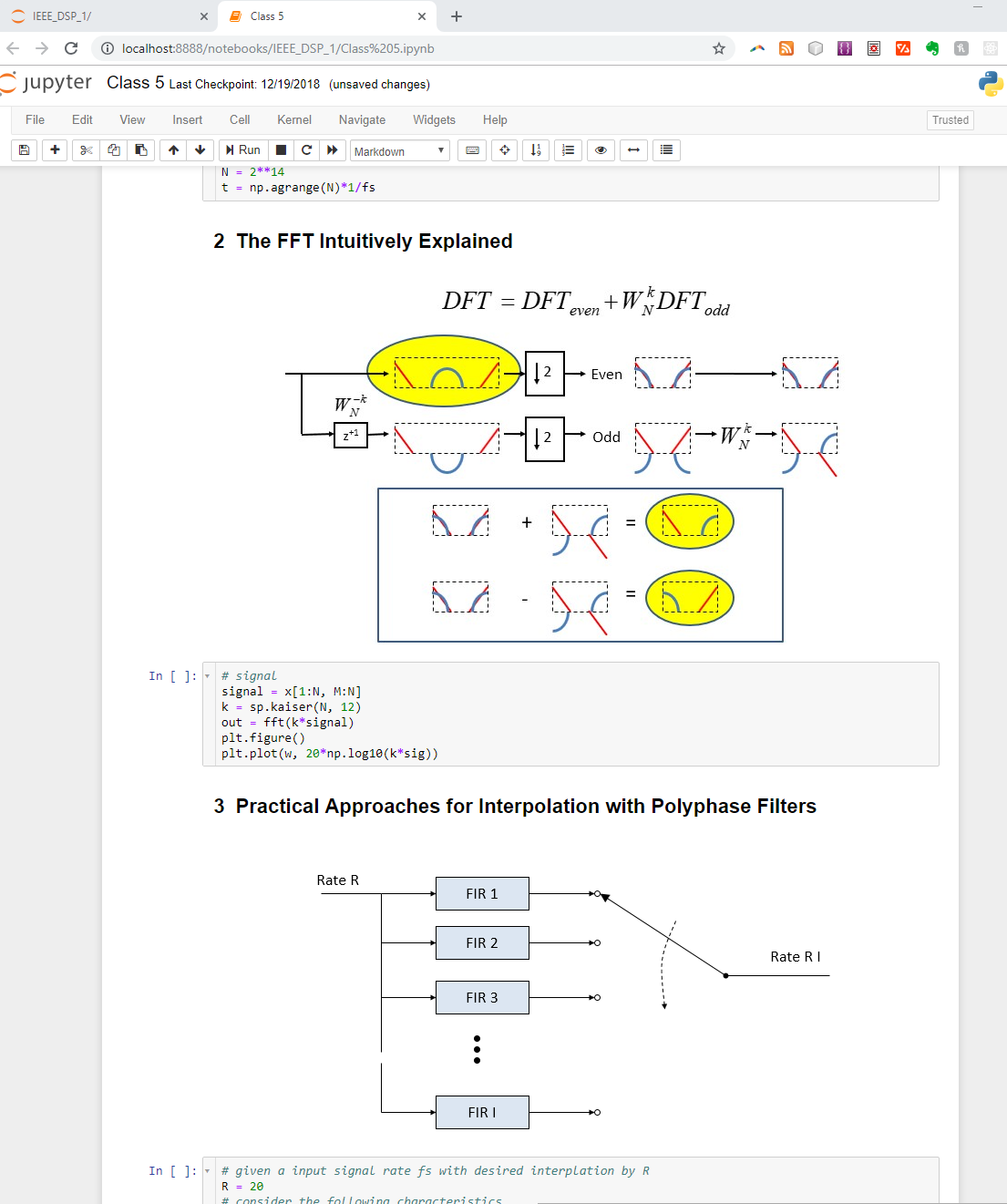
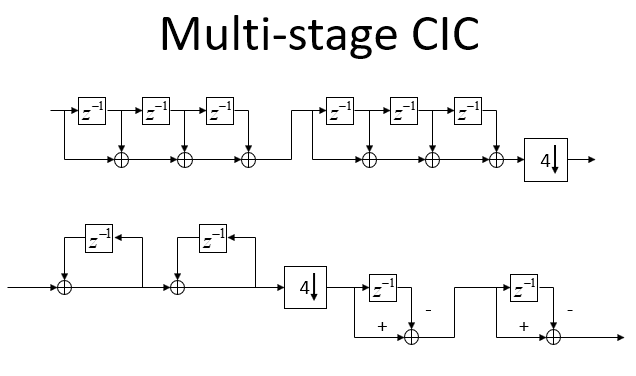
Class 5: May23, 2024: Fast Fourier Transform, Multi-rate Signal Processing, Multi-rate Filters
Speaker’s Bio:
Dan Boschen has a MS in Communications and Signal Processing from Northeastern University, with over 25 years of experience in system and hardware design for radio transceivers and modems. He has held various positions at Signal Technologies, MITRE, Airvana and Hittite Microwave designing and developing transceiver hardware from baseband to antenna for wireless communications systems. Dan is currently at Microchip (formerly Microsemi and Symmetricom) leading design efforts for advanced frequency and time solutions.
For more background information, please view Dan’s Linked-In page at: http://www.linkedin.com/in/danboschen
Registration is open through the last live workshop date. Live workshops are recorded for later use.
COURSE DESCRIPTION
Course Kick-off / Orientation Thursday, April 18, 6:00PM – 6:30PM.
Live Workshops: 6:00PM – 7:30PM, Thursdays, April 25, May 2, 9, 16, 23
Registration is open through the last live workshop date. Live workshops are recorded for later use.
Attendees will have access to the recorded session and exercises for two months (until July 23, 2024) after the live session ends!
Speaker: Dan Boschen
IEEE Member Fee (by April 11th): $190.00
IEEE Member Fee (after April 11th): $285.00
IEEE Non-Member Fee (by April 11th): $210.00
IEEE Non-Member Fee (after April 11th) $315.00
Decision to run/cancel course: Friday, April 12, 2024
COURSE DESCRIPTION
New Format Combining Live Workshops with Pre-recorded Video
This is a hands-on course providing pre-recorded lectures that students can watch on their own schedule and an unlimited number of times prior to live Q&A/Workshop sessions with the instructor. Ten 1.5 hour videos released 2 per week while the course is in session will be available for up to two months after the conclusion of the course.
Course Summary
This course is a fresh view of the fundamental and practical concepts of digital signal processing applicable to the design of mixed signal design with A/D conversion, digital filters, operations with the FFT, and multi-rate signal processing. This course will build an intuitive understanding of the underlying mathematics through the use of graphics, visual demonstrations, and applications in GPS and mixed signal (analog/digital) modern transceivers. This course is applicable to DSP algorithm development with a focus on meeting practical hardware development challenges in both the analog and digital domains, and not a tutorial on working with specific DSP processor hardware.
Now with Jupyter Notebooks!
This long-running IEEE Course has been updated to include Jupyter Notebooks which incorporates graphics together with Python simulation code to provide a “take-it-with-you” interactive user experience. No knowledge of Python is required but the notebooks will provide a basic framework for proceeding with further signal processing development using that tools for those that have interest in doing so.
This course will not be teaching Python, but using it for demonstration. A more detailed course on Python itself is covered in a separate IEEE Course “Python Applications for Digital Design and Signal Processing”.
Students will be encouraged but not required to load all the Python tools needed, and all set-up information for installation will be provided prior to the start of class.
Target Audience:
All engineers involved in or interested in signal processing applications. Engineers with significant experience with DSP will also appreciate this opportunity for an in-depth review of the fundamental DSP concepts from a different perspective than that given in a traditional introductory DSP course.
Benefits of Attending/ Goals of Course:
Attendees will build a stronger intuitive understanding of the fundamental signal processing concepts involved with digital filtering and mixed signal analog and digital design. With this, attendees will be able to implement more creative and efficient signal processing architectures in both the analog and digital domains. The knowledge gained from this course will have immediate practical value for any work in the signal processing field.
Topics / Schedule:
Pre-recorded lectures: (3 hours each) will be distributed Friday prior to each week’s workshop dates. Workshop/Q&A Sessions are 6 – 7:30PM on the dates listed below.
Kick-off / Orientation: Thursday, April 18, 2024
Class 1: April 25, 2024: Correlation, Fourier Transform, Laplace Transform
Class 2: May 2, 2024: Sampling and A/D Conversion, Z –transform, D/A Conversion
Class 3: May 9, 2024: IIR and FIR Digital filters, Direct Fourier Transform
Class 4: May 16, 2024: May Windowing, Digital Filter Design, Fixed Point vs Floating Point
Class 5: May23, 2024: Fast Fourier Transform, Multi-rate Signal Processing, Multi-rate Filters
Speaker’s Bio:
Dan Boschen has a MS in Communications and Signal Processing from Northeastern University, with over 25 years of experience in system and hardware design for radio transceivers and modems. He has held various positions at Signal Technologies, MITRE, Airvana and Hittite Microwave designing and developing transceiver hardware from baseband to antenna for wireless communications systems. Dan is currently at Microchip (formerly Microsemi and Symmetricom) leading design efforts for advanced frequency and time solutions.
For more background information, please view Dan’s Linked-In page at: http://www.linkedin.com/in/danboschen
Registration is open through the last live workshop date. Live workshops are recorded for later use.
Consultants’ Network
Consultants’ Network: https://boston-consult.org
Free Dinner starts at 6:00 PM
Meeting starts at 7:00 PM – On-site and Zoom
Members in good standing are encouraged to attend. If you are unable to attend, then we will also be on Zoom.
Your registration confirmation email contains the Zoom details.
As a group of skilled consultants associated with IEEE Boston Section, CNET offers high value professional services for a diverse audience.
For CNET members:
- Professional interactions with peers in a supporting environment.
- General information from insiders about the condition of industry.
- Practical information exchanges about consulting practice.
- Communication improvement across multiple specialties.
- Participation in info-professional events on themes of interest.
- Opportunity to give presentations and hone speaking effectiveness.
- Credibility and visibility within the engineering and technology development community as an IEEE associated consultant.
For engineers interested in becoming consultants:
- Basic information on consulting practice requirements.
- Participation in events and idea exchanges with industry peers.
- Access to established consultants in the area for mentoring.
- Opportunities for improving professional communications skills.
For enquirers on CNET services:
- Convenient access to local consultants with multi-disciplinary expertise.
- Opportunities to enter into consulting agreements without agency fees.
- Direct, easy connection with consultants over the CNET web page.
- Dealing with consultants with multi-year experience validated by IEEE.
Join us!

IEEE Boston Section recognized for Excellence in Membership Recruitment Performance

IEEE Boston Section was founded Feb 13, 1903, and serves more than 8,500 members of the IEEE. There are 29 chapters and affinity groups covering topics of interest from Aerospace & Electronic Systems, to Entrepreneur Network to Women in Engineering to Young Professionals. The chapters and affinity groups organize more than 100 meetings a year. In addition to the IEEE organization activities, the Boston Section organizes and sponsors up to seven conferences in any given year, as well as more than 45 short courses. The Boston Section publishes a bi-weekly newsletter and, currently, a monthly Digital Reflector newspaper included in IEEE membership.
The IEEE Boston Section also offers social programs such as the section annual meeting, Milestone events, and other non-technical professional activities to round out the local events. The Section also hosts one of the largest and longest running entrepreneurial support groups in IEEE.
More than 150 volunteers help create and coordinate events throughout the year.